

-
18 jul 2024Industrial companies are spearheading the fight against climate change
-
-
09 jul 2024Energía eléctrica y renovablesModular construction: Pros and cons
-

Xing Li, P.Eng.
Practice Leader - Civil, Structural and Geotechnical
-
-
28 jun 2024Energía eléctrica y renovablesHow can energy efficiency support decarbonization efforts?
-

Pierre-Luc Bouchard
Principal Engineer | Energy and Air Quality
-
-
25 jun 2024Valuing Indigenous knowledge to develop natural resources sustainably
-
jun 11, 2021
How to effectively establish static head while sizing centrifugal pumps in mining applications
In the course of our design activities, we often come across pumping system calculations. One of the parameters that needs to be established for proper pump sizing is the system’s static head. This deliberation frequently arises when one specific type of piping configuration is considered. We often see it in in-plant pumping systems, specifically in slurry applications. This blog article will attempt to demystify the issue and provide some practical recommendations on how to properly establish static head value.
-
Description of the problem
Two types of pumping systems can be used, depending on the piping elevation profile.
Type 1: Systems with no piping section at an elevation higher than the discharge point. In slurry applications, for example, this type of system is used for pumping to bottom-fed gravity distributors (see Figure 1). For this type of system, static head (SH) is not ambiguous and must be set as shown below.
-
-
Type 2: Systems with a piping section at an elevation higher than the discharge point (see Figure 2).
-
-
This configuration is sometimes chosen to accommodate a specific plant layout. It is also used when we want to artificially increase pump head to bring it inside the operational envelope, a situation that occurs when we need to pump “across the aisle” (i.e., not upwards) from a pump box to a piece of equipment or tank located at the same elevation or slightly higher.
With this configuration, the question is: Which of the two static head values—SH1 or SH2—should be used as an input for a system calculation?
Discussion
Discharging onto the Type 2 system happens as follows: When pumping is initiated, the liquid first reaches the high point elevation corresponding to SH1. Here it primes the siphon, which is shown in the clouded section of Fig. 2. Once flow is established and discharge from the end of the pipe is steady, the pump will deliver to the piping system with a static head of SH2 (measured to the elevation of the pipe discharge, if it is not flooded). From this point on, the siphon section will work under a vacuum.
Based on the description above, it would seem that SH1 should be used for the calculations. However, while it may seem logical, this approach should be scrutinized for the following reasons:
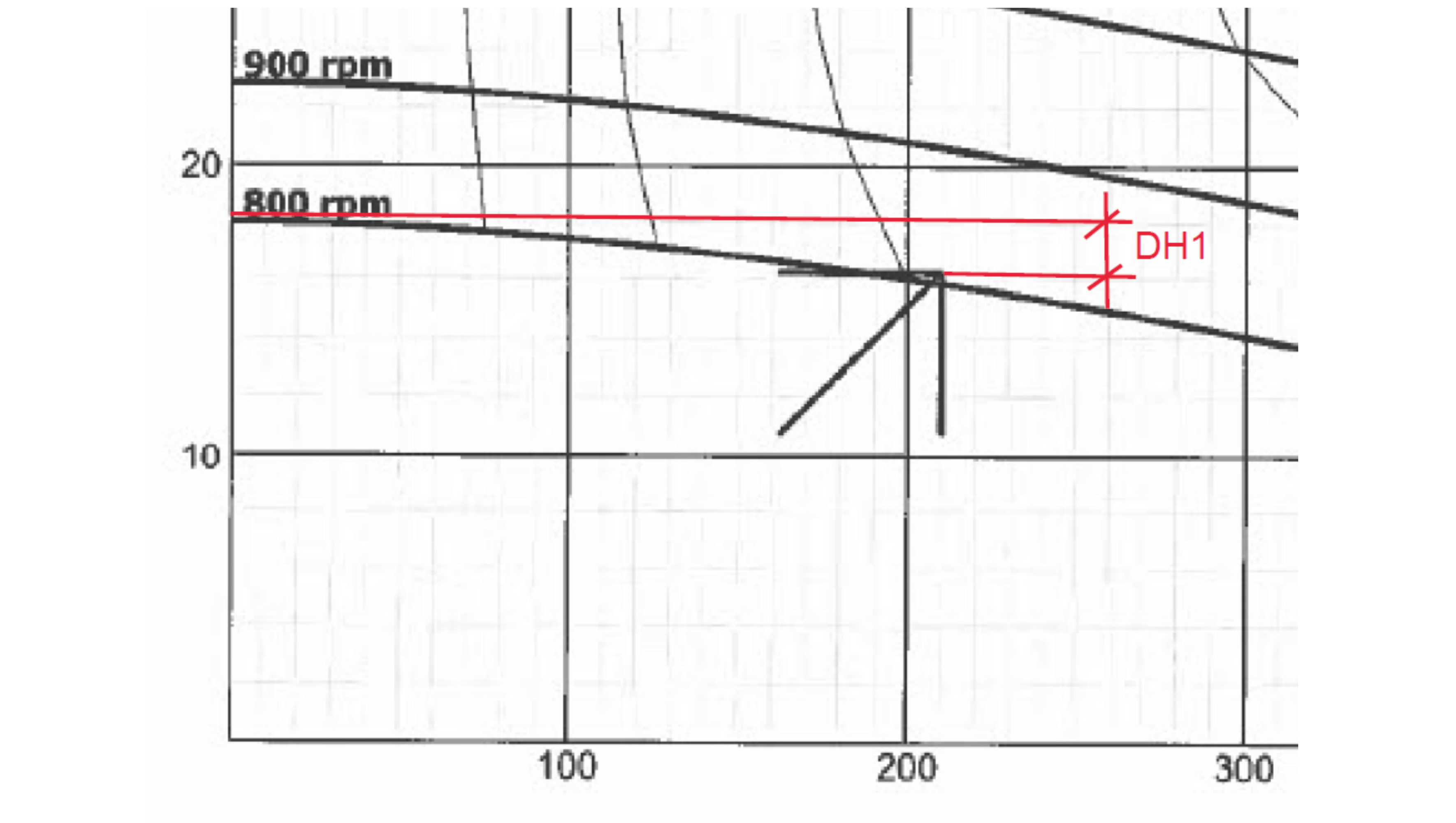
A. The pump still needs to be able to develop a head that is sufficient enough to reach the highest piping elevation in order to charge the siphon. This is not assured if a fixed speed pump is sized with SH2. Looking at the typical pump curve, one can infer that, at a minimum, the elevation difference of DH (Fig.2) should not exceed the head gain between the established operating point head and the pump shutoff head on the corresponding pump curve DH1 (Fig. 3). Further, for practical reasons, the actual head gain should be less than DH1 to ensure that, during siphon priming, the pump flow isn’t too close to zero. Practically, it should be at least 15% or 20% of the design flow rate.
-
-
This consideration is even more important in the case of slurry pumping because slurry pump curves are typically rather flat and consequently DH1 tends to be low.
B. The amount of vacuum pressure developed in the siphon depends on the DH value. The absolute pressure in the vacuum gauge is approximately 10 m for the water column, but it is 10/SG for the slurry column. This vacuum level is not practical to reach. I would recommend setting the maximum operating vacuum in the siphon not higher than 50% to 60% of that absolute maximum. If this criterion is used, then for the slurry system with SG=1.5, the maximum DH should not be higher than 10 x (50% to 60%)/1.5 = 3.35 m to 4m. This is much more practical.
C. If the plant layout requires the DH to be higher than 4 m for slurry systems, then a vacuum breaker should be installed at the highest piping elevation to break the siphon vacuum. Following this, the pump should be sized with a system static head of SH1. As a result, no vacuum will be observed in the siphon section of the piping.
D. Some leverage may be provided when sizing a variable speed pump, since it may overdrive while charging the siphon at the start of the pumping cycle. However, as soon as steady flow is established, it will need to reduce the speed back to the operating point established in the design, with system static head of SH2. This will prevent the pump flow from increasing unnecessarily (i.e., past a point required for process conditions). The reduction in speed should be controlled by a pressure transmitter that responds to a drop in pump discharge pressure after steady flow has been reached.
Conclusion
When sizing pumps serving a Type 2 piping system, the static head should be carefully considered. Neglecting doing this may lead to erroneously sized pump speed, estimate of required motor horsepower and may trigger adverse effects in the siphon section of the piping system. Air pockets may form at the siphon and lead to flow interruption, potential cavitation issues and erratic pump performance (i.e. reduced flow or stop-and-go type flow). This is even more important when sizing slurry pumping systems because of the nature of slurry pumps’ curves and the fact that the pumped liquid is heavier than water and vacuum at the siphon will be reached at the lower DH values.
This content is for general information purposes only. All rights reserved ©BBA



